يُظهر تطور جديد إمكانية وجود آلات متطورة يمكنها بناء نفسها بنفسها
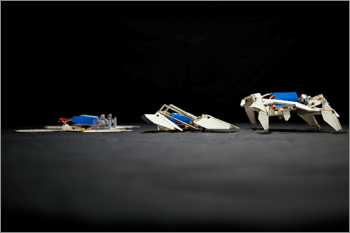
استخدم فريق من المهندسين لعبة الأطفال الكلاسيكية "دينكس شرينكي" - التي تنكمش عند تسخينها - لبناء روبوت يجمع نفسه من حالة مسطحة إلى شكل معقد في أربع دقائق، ويزحف بعيدًا دون أي تدخل بشري. يوضح التطور الجديد إمكانية بناء آلات متطورة تتفاعل مع البيئة بسرعة وبتكلفة زهيدة، وكذلك توفير جزء كبير من عملية التصميم والتجميع.
تستمد هذه الطريقة إلهامها من التجميع الذاتي في الطبيعة، كما يحدث على سبيل المثال في التسلسل الخطي للأحماض الأمينية التي تطوي من تلقاء نفسها لتشكل بروتينات معقدة ذات وظائف معقدة.
يقول الدكتور روب وود، عضو هيئة التدريس في معهد ويس للعلوم المستوحاة بيولوجيا: "إن إمكانية أن يتمكن الروبوت من تجميع نفسه بشكل مستقل وأداء المهمة الموكلة إليه كانت بمثابة علامة فارقة كنا نسعى إليها منذ سنوات عديدة". الهندسة في جامعة هارفارد وأستاذ تشارلز ريفر للعلوم الهندسية التطبيقية في كلية هارفارد للعلوم الهندسية التطبيقية (SEAS). ضم الفريق مهندسين وعلماء كمبيوتر من معاهد Wyss وSEAS بجامعة هارفارد ومعهد ماساتشوستس للتكنولوجيا (MIT).
بالإضافة إلى توسيع الطرق الممكنة لتصنيع الروبوتات بشكل عام، سيكون من الممكن استخدام هذه الطريقة في تطبيقات أكثر غرابة.
"تخيل العشرات من الأقمار الصناعية الروبوتية محشورة معًا حتى يمكن إرسالها إلى الفضاء ثم تجميع نفسها عن بعد بمجرد وصولها إلى هناك. وقال سام فيلتون، طالب الدكتوراه في SEAS والمؤلف الرئيسي للورقة البحثية، إن بإمكانهم التقاط الصور وجمع البيانات ومواصلة مهمتهم كما لو تم إطلاقهم بالفعل.
تعد الروبوتات تتويجًا لسلسلة من التحسينات التي أجراها الفريق في السنوات الأخيرة، بما في ذلك تطوير المكونات الروبوتية المطبوعة التي لا تزال تتطلب مشاركة الإنسان أثناء الطي نفسه - والمصباح القابل للطي الذاتي الذي كان يجب تشغيله بواسطة الإنسان بعد ذلك. تجميع نفسه. والروبوت الجديد هو الأول من نوعه الذي يبني نفسه ويعمل دون تدخل بشري.
وقال فيلتون: "لقد أنشأنا هنا نظامًا كهروميكانيكيًا كاملاً مدمجًا في شكل مسطح ثنائي الأبعاد". استخدم أعضاء الفريق أدوات التصميم المحوسبة للحصول على التصميم الأمثل ونمط الطي، وبعد حوالي 40 نموذجًا أوليًا، وجد بيلتون الروبوت الذي يمكنه طي نفسه والابتعاد. قام بإنشاء الشكل ثنائي الأبعاد باستخدام طابعة حبر صلبة وآلة ليزر ويديه.
استغرق تجميع التصميم الرائع ساعتين فقط باستخدام طريقة تعتمد على الأوريجامي، وهو الفن الياباني القديم المتمثل في طي ورقة واحدة لتكوين هياكل معقدة. سمح النهج المستوحى من الأوريغامي للفريق بتجنب الحاجة إلى استخدام "البراغي والصواميل" وهو النهج التقليدي لتجميع الآلات المعقدة.
وقال فيلتون إنهم بدأوا بلوحة مسطحة، وأضافوا إليها محركين، وبطاريتين، ووحدة تحكم صغيرة (وحدة تحكم صغيرة) - تعمل مثل "عقل" الروبوت.
تتكون الورقة من الورق وShrinky Dinks، وهي لعبة تحتوي على الستايروفوم - ودائرة مرنة واحدة في المنتصف. يشتمل الروبوت أيضًا على مفصلات تمت برمجتها للطي بزوايا معينة. يحتوي كل عمود على دوائر مدمجة تنتج الحرارة بناءً على أمر من وحدة التحكم الصغيرة. تسبب الحرارة الطي الذاتي في سلسلة من الخطوات.
وعندما تبرد المفصلات بعد حوالي أربع دقائق، يتصلب الستايروفوم، مما يجعل الروبوت صلبًا. تشير وحدة التحكم الصغيرة إلى الروبوت بالزحف والابتعاد بسرعة تبلغ حوالي عُشر الساعة. يستهلك الحدث بأكمله كمية الطاقة المخزنة في بطارية قلوية واحدة من نوع AA.
يعمل الروبوت الحالي بمؤقت، وينتظر حوالي عشر ثوانٍ بعد تركيب البطاريات ويبدأ في الطي. ومع ذلك، قال فيلتون: "يمكننا بسهولة تغيير ذلك بحيث يتم تشغيل الطي بواسطة مستشعر لعامل بيئي، مثل درجة الحرارة أو الضغط".
أحد التحديات الرئيسية في هذه العملية، وفقًا لفيلتون، كان ميل الروبوتات إلى الاحتراق قبل طيها بشكل صحيح. قال فيلتون، الذي يخطط لتجربة أنواع مختلفة من البوليمرات التي تتذكر الشكل، وهي مواد مثل الستايروفوم ولكنها أقوى وتتطلب حرارة أقل للعمل: "هناك العديد من الطرق التي يمكننا من خلالها تحسين هذه الخطوة التأسيسية".
هذه الطريقة هي طريقة مكملة للطباعة ثلاثية الأبعاد، والتي تبشر بوعد كبير لإنتاج سريع ورخيص للمكونات الروبوتية ولكنها تواجه أيضًا صعوبة في دمج المكونات الكهربائية، وفي هذه الحالة المحددة، كان إنتاج النموذج الأولي الوظيفي سيستغرق وقتًا أطول.
الحلم طويل المدى، وفقًا لوود، هو بناء جهاز يمكن لأي شخص تجميعه في المنزل عندما يحتاج إلى روبوت منزلي للمساعدة. وقال وود: "ستكون قادرا على وصف ما تحتاجه بمصطلحات أساسية، ثم تعود بعد ساعة لتحصل على مساعدك الآلي". في المجمل، تبلغ تكلفة كل روبوت حوالي 100 دولار، ولكن 20 دولارًا فقط للجسم بدون محركات وبطاريات وأجهزة تحكم صغيرة.
المصدر: معهد وايز للهندسة المستوحاة من علم الأحياء بجامعة هارفارد
