كشفت الأبحاث متعددة التخصصات، التي أجريت في ثلاث كليات في التخنيون، عن التكوين الأمثل للروبوتات الصغيرة التي ستتحرك داخل الجسم وتقوم بمهام طبية مختلفة. النموذج الذي تم تطويره في التخنيون يتفوق على النماذج السابقة التي تم تطويرها مستوحاة من الطبيعة
قامت مجموعة بحثية من ثلاث كليات في التخنيون بفك رموز التكوين الأمثل لقيادة الروبوتات الصغيرة التي تسبح في جسم الإنسان. البحث، الذي نشر في مجلة Science Robotics، أشرف عليه البروفيسور أليكس ليشانسكي من كلية وولفسون للهندسة الكيميائية.
انخرطت العديد من المجموعات البحثية حول العالم في العقد الماضي في تطوير روبوتات صغيرة - نانومتر وميكرومتر - تتحرك في بيئة سائلة. وذلك لأن مثل هذه الروبوتات قد تساهم كثيرًا في عالم الطب، على سبيل المثال من خلال نقل الأدوية.
المصدر الأولي للإلهام لتطوير الروبوتات الصغيرة هو حركة البكتيريا، التي تتحرك عن طريق قضيب حلزوني رفيع (السوط). يؤدي دوران القضيب في السائل إلى خلق احتكاك يحرك البكتيريا. مستوحاة من هذه الآلية الطبيعية، طورت هذه المجموعات ملفات صغيرة يقودها مجال مغناطيسي دوار منتظم.

إن استخدام المجال المغناطيسي الدوار لدفع الأجسام الصغيرة له العديد من المزايا، بما في ذلك شدة المجال المنخفضة المطلوبة لهذا الغرض. نظرًا لأن إنتاج ملفات صغيرة يعد عملية معقدة، فقد تم اقتراح مؤخرًا استخدام مجموعات عشوائية من الجسيمات النانوية المغناطيسية كـ "سبَّاحين" صغيرين. يتم إنشاء هذه المجاميع في عملية تجميع (تجميع) بسيطة. الآن، في دراسة نشرت في Science Robotics، أظهر باحثو التخنيون أن هذا النهج لا يؤدي إلى النتائج المثلى.
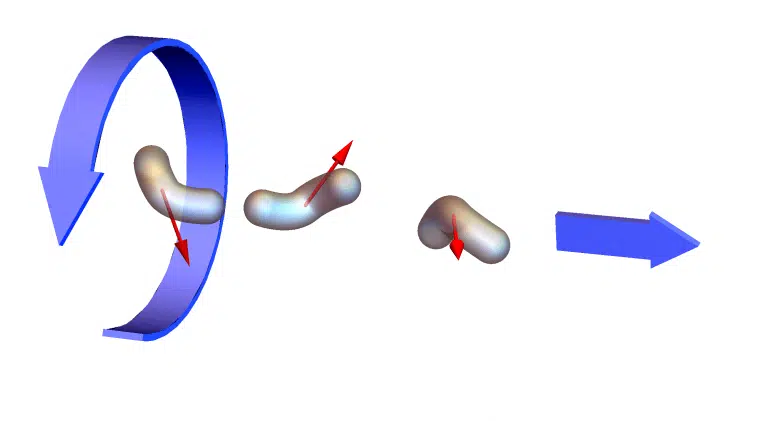
كجزء من البحث، طور باحثو التخنيون نظرية تتيح حساب سرعة الحركة المثالية للسباحين المغناطيسيين اعتمادًا على الشكل والمغناطيس. وباستخدام هذه النظرية، قاموا بقياس أقصى سرعة ممكنة للمجموعات المغناطيسية العشوائية وحسبوا التكوينات المثالية لـ "السباحين" لآلية الدفع هذه. ولدهشتهم، اكتشفوا أن الملف الرفيع الذي تم تطويره مستوحى من الطبيعة لم يكن الهيكل الأمثل، وأن الشكل الأمثل يشبه القوس السميك مع حواف ملتوية. كما وجدوا أن التشكيلات التي اكتشفوها تتحرك بسرعة أعلى بعدة مرات من سرعة التجمعات العشوائية التي تم تطويرها سابقًا.
تضم مجموعة البحث الفني باحثين من ثلاث كليات: كلية الرياضيات وكلية الفيزياء وكلية وولفسون للهندسة الكيميائية. ويقدر البروفيسور أليكس ليشانسكي، الذي قاد البحث، أن النتائج ستؤدي إلى تطوير روبوتات صغيرة أكثر كفاءة. ووفقا له، فإن "افتراض معظم المجموعات البحثية العاملة في هذا المجال هو أن البنية الحلزونية للسباح الصغير، والتي تم تطويرها مستوحاة من الطبيعة، هي البنية الأمثل. ولدهشتنا، اكتشفنا أن الشكل الأمثل ليس حلزونيًا، ومن دواعي سرورنا أننا تمكنا من تقديم تكوين أكثر كفاءة."
تم دعم هذا البحث من قبل المؤسسة الألمانية الإسرائيلية (GIF)، ومؤسسة العلوم الإسرائيلية (ISF) ومنحة مشتركة ("تعويذة") من مكتب الاستيعاب ولجنة التخطيط والميزانية التابعة لمجلس التعليم العالي.
في الفيديو: السباح الاصطناعي الأمثل يدور حول نفسه تحت تأثير المجال المغناطيسي وبالتالي يتحرك للأعلى
المزيد عن الموضوع على موقع العلوم:
- الروبوتات النانوية المصنوعة من البكتيريا ستهاجم الخلايا السرطانية بدقة بدلاً من العلاج الكيميائي الحالي والشامل
- تشغيل الروبوتات النانوية / لاري جرينماير
- تقدم مهم في تطوير الروبوتات النانوية الطبية
- الروبوت الذي سيصلحني: تكنولوجيا النانو في جسم الإنسان - من كتاب الدكتور روي سيزانا "الدليل إلى المستقبل"
